Goste ou não, estamos cercados por robôs. Milhares de americanos viajam para o trabalho hoje em dia em carros que praticamente dirigem a si mesmos. Os aspiradores de pó entram em nossas salas de estar sozinhos. Os drones Quadcopter zipam automaticamente os campos agrícolas, realizando pesquisas aéreas que ajudam os agricultores a cultivar suas plantações. Mesmo robôs humanóides de aparência assustadora, que podem pular e correr como nós, podem estar comercialmente disponíveis em um futuro próximo.
Dispositivos robóticos estão ficando muito bons em se movimentar pelo mundo sem qualquer intervenção nossa. Mas apesar dessas novas habilidades, eles ainda vêm com uma grande fraqueza: os mais talentosos do bando ainda podem ser parados em suas trilhas por uma simples maçaneta.
A questão, diz Matt Mason, roboticista da Carnegie Mellon University, é que, para que todas as habilidades existentes dos robôs se movam pelo mundo de forma autônoma, elas ainda não podem interagir fisicamente com os objetos de maneira significativa quando chegarem lá.
“O que aprendemos com a robótica? A lição número um é que a manipulação é difícil. Isso é contrário à nossa experiência individual, já que quase todo ser humano é um manipulador habilidoso ”, escreve Mason em um recente artigo de revisão.
É um ponto justo. Nós, humanos, manipulamos o mundo ao nosso redor sem pensar. Nós pegamos, cutucamos, torcemos, cortamos e cutucamos objetos quase inconscientemente, graças em parte a nossas mãos incrivelmente hábeis. Como resultado, construímos nossos mundos com esses apêndices em mente. Todos os celulares, teclados, rádios e outras ferramentas que manuseamos ao longo de toda a nossa vida foram projetados explicitamente para caber em nossos dedos e palmas.
Não é assim para robôs existentes. No momento, um dos designs de mão robótica mais usados, chamado de “pinça”, é mais ou menos idêntico aos imaginados na TV nos anos 60: um dispositivo feito de dois dedos de metal duro que comprimem objetos entre eles.
Em um ambiente controlado como uma linha de montagem, dispositivos como esses funcionam bem. Se um robô sabe que toda vez que ele alcança uma parte específica, ele estará no mesmo lugar e orientação, então, agarrá-lo é trivial. “Está claro que tipo de peça vai descer pela correia transportadora, o que torna o sensoriamento e a percepção relativamente fáceis para um robô”, observa Jeannette Bohg, um roboticista da Universidade de Stanford.
O mundo real, por outro lado, é confuso e cheio de incógnitas. Pense na sua cozinha: pode haver pilhas de pratos secando ao lado da pia, vegetais macios e frágeis alinhados na geladeira e vários utensílios recheados em gavetas estreitas. Do ponto de vista de um robô, diz Bohg, identificar e manipular essa vasta gama de objetos seria o caos total.
“Isso é de certa forma o Santo Graal, certo? Muitas vezes, você quer manipular uma ampla gama de objetos que as pessoas comumente manipulam e que foram manipulados por pessoas ”, diz Matei Ciocarlie, pesquisador de robótica e engenheiro mecânico da Universidade de Columbia. “Podemos construir manipuladores para objetos específicos em situações específicas. Isso não é um problema. É a versatilidade que é a dificuldade ”.
Para lidar com o grande número de formas e propriedades físicas únicas desses materiais - sejam eles sólidos como uma faca ou deformáveis, como um pedaço de plástico - um apêndice robótico ideal seria necessariamente algo que se assemelha ao que está no final de nossos braços. Mesmo com ossos rígidos, nossas mãos se dobram e flexionam quando nós agarramos os itens, então se a mão de um robô pode fazer o mesmo, ele poderia “prender” objetos dentro de seu alcance e movê-los em uma superfície seus brinquedos.
Engenharia que a versatilidade não é pouca coisa. Quando os engenheiros da iRobot - a mesma empresa que trouxe o aspirador de pó Roomba - desenvolveram uma “mão” flexível de três dedos há vários anos, ela foi saudada como um grande feito. Hoje, os roboticistas continuam a se afastar de uma réplica fiel da mão humana, procurando materiais macios e melhores ferramentas computacionais, como aprendizado de máquina para controlá-los.
A busca por “mãos” suaves e flexíveis
“Garras humanóides tendem a ser muito mais delicadas e muito mais caras, porque você tem muito mais motores e elas são colocadas em um espaço pequeno”, diz Dmitry Berenson, que estuda manipulação robótica autônoma na Universidade de Michigan. “Realmente, você tem que ter muita engenharia para fazer funcionar, e muita manutenção, normalmente.” Por causa dessas limitações, ele diz, as mãos humanas existentes não são amplamente utilizadas pela indústria.
Para uma mão robótica ser prática e até mesmo aproximar-se da habilidade humana, ela teria que ser firme, mas flexível; ser capaz de sentir frio, calor e toque em altas resoluções; e seja gentil o suficiente para pegar objetos frágeis, mas robusto o suficiente para suportar uma surra. Ah, e além disso tudo, teria que ser barato.
Para contornar este problema, alguns pesquisadores estão procurando criar um meio feliz. Eles estão testando mãos que imitam alguns dos nossos próprios traços, mas são muito mais simples de projetar e construir. Cada um usa “dedos” de látex macios acionados por cabos semelhantes a tendões que os abrem e fecham. A vantagem desses tipos de projetos é a sua flexibilidade literal - quando encontram um objeto, eles podem esmagá-lo, formar sua forma complexa e recolhê-lo nitidamente.
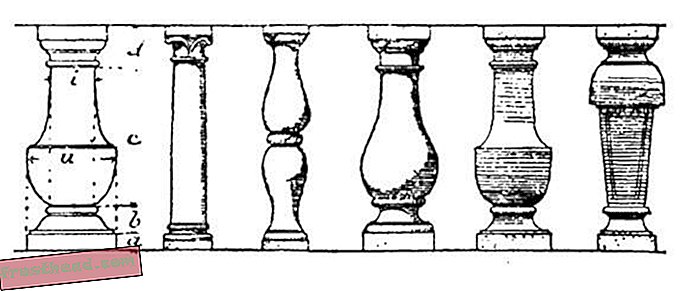
 Em vez de mãos que imitam muito a nossa, alguns pesquisadores estão trabalhando em silicone, flexível e feito de silicone. Nesta imagem, os dedos ocos de silicone ondulam quando estão cheios de ar, apertando-os em torno de objetos de formas incomuns. (J. MORROW ET AL / IEEE CONFERÊNCIA INTERNACIONAL SOBRE ROBÓTICA E AUTOMAÇÃO (ICRA) 2016)
Em vez de mãos que imitam muito a nossa, alguns pesquisadores estão trabalhando em silicone, flexível e feito de silicone. Nesta imagem, os dedos ocos de silicone ondulam quando estão cheios de ar, apertando-os em torno de objetos de formas incomuns. (J. MORROW ET AL / IEEE CONFERÊNCIA INTERNACIONAL SOBRE ROBÓTICA E AUTOMAÇÃO (ICRA) 2016) Essas “mãos” sujas oferecem uma grande melhoria em relação a uma pinça de metal duro. Mas eles só começam a resolver o problema. Embora um dedo de borracha funcione muito bem para pegar todos os tipos de objetos, ele vai lutar com habilidades motoras necessárias para tarefas simples como colocar uma moeda em um slot - o que envolve não apenas segurar a moeda, mas também sentir o slot, evitando suas bordas. e deslizando a moeda para dentro. Por essa razão, diz Ciocarlie, criar sensores que digam aos robôs mais sobre os objetos que eles tocam é uma parte igualmente importante do quebra-cabeça.
Os nossos próprios dedos têm milhares de receptores de toque individuais incorporados na pele. “Não sabemos realmente como construir esses tipos de sensores e, mesmo se o fizéssemos, teríamos muita dificuldade em conectá-los e obter essas informações de volta”, diz Ciocarlie.
O grande número de sensores necessários levantaria uma segunda questão, ainda mais complicada: o que fazer com toda essa informação depois de adquirida. Os métodos computacionais que permitem que um robô use grandes quantidades de dados sensoriais para planejar seu próximo movimento estão começando a surgir, diz Berenson. Mas levar essas habilidades até onde elas precisam ser pode superar todos os outros desafios que os pesquisadores enfrentam ao conseguir uma manipulação autônoma. Construir um robô que possa usar suas “mãos” rápida e perfeitamente - mesmo em situações completamente novas - pode não ser possível, a menos que os engenheiros possam dotá-lo de uma forma de inteligência complexa.
Essa inteligência é algo que muitos de nós humanos tomamos como certo. Para pegar um lápis em nossa mesa, simplesmente estendemos a mão e pegamos. Quando jantamos, usamos pinças, garfos e pauzinhos para pegar nossa comida com graça e precisão. Mesmo os amputados que perderam membros superiores podem aprender a usar ganchos protéticos para tarefas que requeiram habilidades motoras finas.
“Eles podem amarrar seus sapatos, eles podem fazer um sanduíche, eles podem se vestir - tudo com o mecanismo mais simples. Então, sabemos que é possível se você tiver a inteligência correta por trás disso ”, diz Berenson.
Ensinando a máquina
Chegar a esse nível de inteligência em um robô pode exigir um salto nos métodos atuais que os pesquisadores usam para controlá-los, diz Bohg. Até recentemente, a maioria dos softwares de manipulação envolvia a construção de modelos matemáticos detalhados de situações do mundo real, permitindo que o robô usasse esses modelos para planejar seu movimento. Um robô recém-construído com a tarefa de montar uma cadeira Ikea, por exemplo, usa um modelo de software que pode reconhecer cada peça individual, entender como ela se encaixa com seus vizinhos e compará-la com a aparência do produto final. Pode terminar o trabalho de montagem em cerca de 20 minutos. Peça para montar um produto Ikea diferente, e ele ficará completamente desorientado.
Os humanos desenvolvem habilidades de maneira muito diferente. Em vez de ter um conhecimento profundo sobre um único tópico limitado, nós absorvemos o conhecimento em tempo real a partir do exemplo e da prática, reforçando as tentativas que funcionam e descartando as que não funcionam. Pense na primeira vez que você aprendeu a cortar uma cebola - depois de descobrir como segurar a faca e cortar algumas vezes, você provavelmente não precisaria começar do zero quando encontrasse uma batata. Então, como alguém consegue um robô para fazer isso?
Bohg acha que a resposta pode estar no “aprendizado de máquina”, uma espécie de processo iterativo que permite que um robô entenda quais tentativas de manipulação são bem-sucedidas e quais não são - e permite usar essas informações para manobrar em situações nunca encontradas.
“Antes do aprendizado de máquina entrar no campo da robótica, era tudo sobre modelar a física da manipulação - chegando com descrições matemáticas de um objeto e seu ambiente”, diz ela. “O aprendizado de máquina nos permite dar a um robô um monte de exemplos de objetos que alguém anotou, mostrando: 'Aqui é um bom lugar para pegar'.” Um robô poderia usar esses dados para ver um objeto inteiramente novo e entender como agarrá-lo.
Esse método representa uma grande mudança em relação às técnicas de modelagem anteriores, mas pode demorar um pouco até ser sofisticado o suficiente para permitir que os robôs aprendam por conta própria, diz Berenson. Muitos algoritmos de aprendizado de máquina existentes precisam ser alimentados com grandes quantidades de dados sobre possíveis resultados - como todos os movimentos em potencial em um jogo de xadrez - antes que eles possam começar a elaborar o melhor plano possível de ataque. Em outros casos, eles podem precisar de centenas, se não milhares, de tentativas de manipular um determinado objeto antes que ele tropeça em uma estratégia que funcione.
Isso terá que mudar se um robô quiser se mover e interagir com o mundo o mais rápido que puder. Em vez disso, diz Berenson, um robô ideal deve ser capaz de desenvolver novas habilidades em apenas algumas etapas usando tentativa e erro, ou ser capaz de extrapolar novas ações a partir de um único exemplo.
 Apollo, um robô construído pela engenheira Jeannette Bohg, tenta mover um cilindro através de uma mesa enquanto uma caixa de papelão bloqueia seu caminho. Nesse experimento, um pesquisador deslocou a caixa para novos locais na mesa enquanto o braço se movia, forçando a Apollo a recalcular sua trajetória em tempo real. A imagem embaralhada no canto inferior direito mostra uma visão da perspectiva da Apollo, ressaltando o quão difícil é para um robô reconhecer e interagir com objetos ao seu redor. (CORTESIA JEANNETTE BOHG)
Apollo, um robô construído pela engenheira Jeannette Bohg, tenta mover um cilindro através de uma mesa enquanto uma caixa de papelão bloqueia seu caminho. Nesse experimento, um pesquisador deslocou a caixa para novos locais na mesa enquanto o braço se movia, forçando a Apollo a recalcular sua trajetória em tempo real. A imagem embaralhada no canto inferior direito mostra uma visão da perspectiva da Apollo, ressaltando o quão difícil é para um robô reconhecer e interagir com objetos ao seu redor. (CORTESIA JEANNETTE BOHG) “A grande questão a ser superada é como atualizar os modelos de um robô não com 10 milhões de exemplos, mas um ?”, Ele diz. “Para chegar a um ponto em que diz: 'OK, isso não funcionou, então o que eu faço a seguir?' Essa é a verdadeira questão de aprendizado que vejo.
Mason, o roboticista da Carnegie Mellon, concorda. O desafio de programar robôs para fazer o que fazemos sem pensar, diz ele, é resumido por algo chamado paradoxo de Moravec (em homenagem ao pioneiro da robótica Hans Moravec, que também ensina na Carnegie Mellon). Afirma, em suma, que o que é difícil para os humanos é muitas vezes tratado com facilidade pelos robôs, mas o que é uma segunda natureza para nós é incrivelmente difícil de programar. Um computador pode jogar xadrez melhor do que qualquer pessoa, por exemplo - mas conseguir reconhecer e pegar uma peça de xadrez por conta própria provou ser incrivelmente difícil.
Para Mason, isso ainda soa verdadeiro. Apesar do progresso gradual que os pesquisadores estão fazendo em sistemas de controle robóticos, diz ele, o conceito básico de manipulação autônoma pode ser uma das porcas mais difíceis que o campo ainda tem que quebrar.
“Pensamento racional e consciente é um desenvolvimento relativamente recente na evolução”, diz ele. “Temos todas essas outras máquinas mentais que, ao longo de centenas de milhões de anos, desenvolveram a capacidade de fazer coisas incríveis, como locomoção, manipulação, percepção. No entanto, todas essas coisas estão acontecendo abaixo do nível consciente.
“Talvez as coisas que consideramos como função cognitiva superior, como jogar xadrez ou fazer álgebra - talvez essa coisa seja trivial em comparação com a mecânica da manipulação.”
 A Revista Knowable é um esforço jornalístico independente de Análises Anuais.
A Revista Knowable é um esforço jornalístico independente de Análises Anuais.