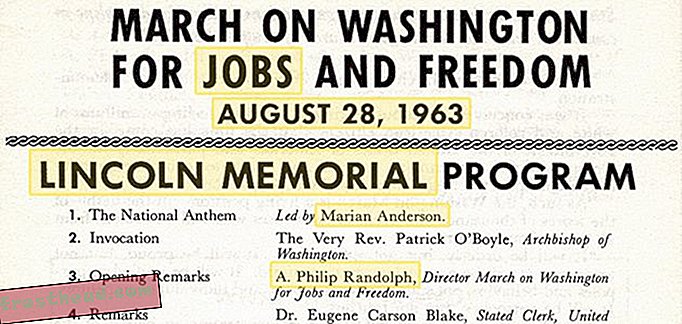
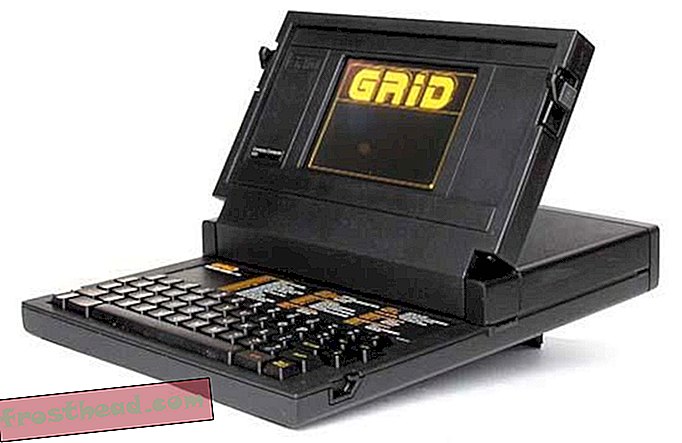
O novo robô atravessa uma superfície irregular de uma forma modelada a partir de um lagarto de cauda de zebra. Imagem cortesia de Chen Li, Tingnan Zhang e Daniel Goldman
Projetar um robô que pode se mover facilmente em terrenos soltos - digamos, um rover destinado a atravessar a superfície de Marte - apresenta um desafio único de engenharia: as rodas geralmente afundam no que os engenheiros chamam de “solo fluente” (misturas de areia, solo, lama e grama). ).
Dadas as muitas inovações biologicamente inspiradas na robótica, uma equipe de pesquisadores da Georgia Tech teve uma ideia - basear um projeto em criaturas do deserto, como lagartos de cauda de zebra capazes de atravessar uma superfície arenosa solta sem diminuir a velocidade. Seus esforços permitiram que eles criassem este pequeno dispositivo de seis pernas, apresentado em um artigo publicado hoje na Science, que pode ser executado em uma superfície granular de uma maneira estranhamente remanescente de um réptil.
A equipe de pesquisa, liderada por Chen Li, projetou o dispositivo depois de estudar a locomoção de várias criaturas e simular matematicamente o desempenho de diferentes tipos de pernas (variando em número, forma e comprimento) em vários ambientes distintos. Eles esperam que sua pesquisa estimule o desenvolvimento de um campo que eles chamaram de “terradinâmica” - assim como a aerodinâmica está relacionada com o desempenho de veículos alados no ar, seu campo estudará o movimento de veículos com pernas em superfícies granulares.
Para projetar seu robô, eles usaram essas simulações para determinar os comprimentos exatos das pernas, as velocidades de movimento e os níveis de força que impulsionariam os dispositivos através de uma superfície solta, sem fazer com que eles afundassem muito profundamente. Eles então imprimiram uma variedade de tipos de perna com uma impressora 3D e construíram robôs para testá-los no laboratório.
Uma de suas descobertas mais interessantes é que os mesmos tipos de princípios de design se aplicam à locomoção em uma variedade de superfícies granulares, incluindo sementes de papoula, contas de vidro e areia natural. Suas simulações e experimentos do mundo real revelaram que as pernas em forma de C geralmente funcionavam melhor, mas que qualquer tipo de membros em forma de arco funcionava relativamente bem porque espalhavam o peso do dispositivo por longas (embora estreitas) superfícies de pernas. em contato com o solo ao longo de um passo.

Os pesquisadores descobriram que os membros em forma de C funcionam melhor para se mover rapidamente sobre superfícies granulares, tanto em lagartos quanto em robôs. Representações tracejadas, sólidas e tracejadas em C e D são posições inicial, intermediária e final da perna durante uma passada. As setas indicam as direções do movimento para regiões de perna específicas. Imagem via Science / Li et. al.
As aplicações desse tipo de pesquisa são amplas: esse robô em particular, dizem os pesquisadores, poderia se transformar em um útil dispositivo de busca e resgate ou de reconhecimento, enquanto os princípios derivados do campo da terradinâmica poderiam ser úteis para projetar sondas para explorar outras planetas no futuro. Eles também poderiam ajudar os biólogos a entender melhor como as formas de vida aqui na Terra evoluíram para atravessar a superfície do nosso planeta.