A superfície de Europa, uma das quatro luas de Júpiter, é um inimigo formidável. Primeiro, está envolto em uma casca grossa de gelo, rasgada em grandes abismos pela enorme força gravitacional de Júpiter. Depois, há a gravidade superficial extremamente baixa e os cânions de gelo escorregadios e transparentes. Mas, abaixo de todo esse gelo, acredita-se também que Europa tenha um oceano de líquido que possa suportar a vida - o que o torna um dos principais alvos da nossa próxima exploração em profundidade do sistema solar.
Conteúdo Relacionado
- Quando os humanos começam a colonizar outros planetas, quem deve ser o responsável?
- Evidence empilha para geysers gelados em erupção na Europa
- Podemos salvar Marte de nós mesmos?
Então, como a NASA superará esse desafio traiçoeiro? Certamente não pode enviar um rover com rodas como o Sojourner, que deu um grande salto para a robotity quando atravessou o Ares Valles de Mars em 1996. Em vez disso, a NASA está tentando acabar com as rodas outrora revolucionárias e reimaginar como a próxima geração de robôs explorará os asteróides e os frios mundos externos do Sistema Solar nas próximas décadas.
Digite: LEMUR.
Atualmente pesando cerca de 75 libras, esta rover da próxima geração é uma fração do tamanho da Curiosity de Marte, que faz o check-in em quase uma tonelada. Só seu tamanho amplia os limites da capacidade robótica - mas, se for implantado, precisará fazer mais do que isso. O veículo de tamanho pequeno terá que suportar temperaturas extremamente extremas e condições magnéticas; navegar em qualquer superfície; e faça isso por tempo suficiente para coletar dados significativos com alguns dos mais inteligentes e inteligentes instrumentos científicos já construídos.
Está à altura da tarefa?
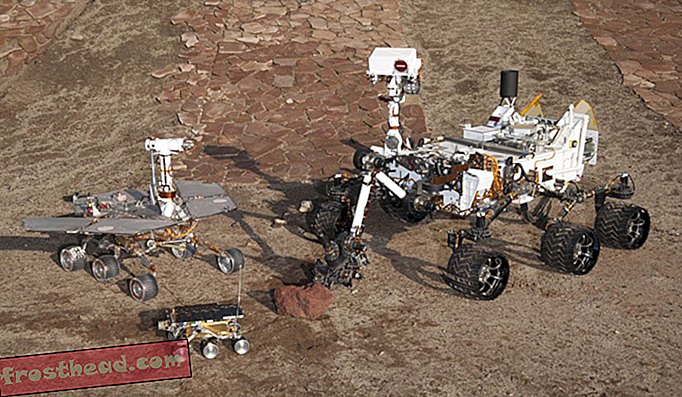 Três gerações de Marte da NASA entre 1997 e 2012, fotografadas dentro do Mars Yard no Jet Propulsion Lab em Pasadena, Califórnia: voo sobressalente para Sojourner (frente), rover de teste do Projeto Mars Exploration Rover (esquerda) e rover Curiosity test (à direita) . (NASA / JPL-Caltech)
Três gerações de Marte da NASA entre 1997 e 2012, fotografadas dentro do Mars Yard no Jet Propulsion Lab em Pasadena, Califórnia: voo sobressalente para Sojourner (frente), rover de teste do Projeto Mars Exploration Rover (esquerda) e rover Curiosity test (à direita) . (NASA / JPL-Caltech) Reconhecidamente, o LEMUR robótico - um acrônimo para “robô mecânico utilitário de excursão limitada” - não é tão fofo quanto as espécies de olhos largos e de cauda fofa popularizados pelo Madagascar da Dreamworks . Em vez disso, o robô recebe o nome da ambidestria do mamífero real. Inicialmente planejado para ser um robô de reparo para missões lunares tripuladas, o rover foi redesenhado para exploração de microgravidade das superfícies verticais e invertidas de desfiladeiros e cavernas.
“[Os lêmures] usam as mãos e os pés para mobilidade e manipulação”, explica Aaron Parness, líder do grupo de robótica de ambientes extremos no Laboratório de Propulsão a Jato da NASA (JPL). “Embora nosso robô não tenha braços e pernas distintos, é semelhante a um macaco ou lêmure, pois pode usar seus pés para fazer as coisas com muito mais eficiência do que os humanos.”
Para garantir que o robô possa se movimentar em ambientes ainda mais estranhos do que aqueles encontrados em Marte, o grupo de Parness criou o que pode ser chamado de “quimerrobot”: um robô que se baseia nas habilidades de muitos animais terrestres diferentes. Com seus membros que se estendem e pés semelhantes a remos, o LEMUR evoca uma aranha ou estrela do mar, usando seus apêndices para se arrastar e se agarrar a superfícies transparentes.
Os quatro membros do robô são equipados com pés circulares intercambiáveis, que podem ser trocados por acessórios com funções diferentes, como o canivete suíço, para ajudá-lo a atravessar uma variedade de superfícies. Os pés de escalada apresentam uma série de minúsculos ganchos de aço afiados, conhecidos como microspines, para agarrar as superfícies ásperas das rochas com firmeza suficiente para que um pé mantenha todo o peso do robô. Para superfícies lisas, como os cascos externos de estações espaciais ou satélites, o LEMUR adere-se a pés pegajosos semelhantes a lagartixas.
Recentemente, os pesquisadores levaram uma das “mãos” do LEMUR para a Antarctica para testar um novo e potencialmente crucial acessório: exercícios de gelo tipo parafuso. Quando Parness e sua equipe estão prontos para testar seu hardware, eles “procuram os lugares mais difíceis que podemos encontrar”, disse Parness. “Temos que encontrar o equilíbrio certo entre ter o ambiente certo, mas também não ser tão remoto que seja uma loucura cara e impossível conseguir o time lá. A Antártida estava no limite disso.
Para fazer isso, eles pediram a Aaron Curtis, um geógrafo que virou vulcanologista que se tornou roboticista e que passou vários verões no extremo sul do continente, rastejando por túneis gelados formados pelo Monte Erebus, o vulcão ativo mais ao sul da Terra. Com temperaturas médias de verão mergulhando a -22 graus Fahrenheit, o vulcão, as formações de gelo que ele cria e seu lago de lava representam uma justa procuração das condições que um veículo espacial legged pode encontrar em luas geladas como Europa ou Enceladus.
 Aaron Curtis viajou para a Antártida em dezembro passado, onde testou robôs e instrumentos projetados para mundos gelados como o Europa. (Nial Peters)
Aaron Curtis viajou para a Antártida em dezembro passado, onde testou robôs e instrumentos projetados para mundos gelados como o Europa. (Nial Peters) Como pesquisador associado do Observatório do Vulcão Monte Erebus durante seis dos últimos sete anos, Curtis mapeou a topografia do gelo em torno do vulcão. Seus interesses particulares estavam abaixo da superfície, nas cavernas e túneis derretidos no gelo por gases que escapavam das fissuras do vulcão. Encontrar lugares onde os túneis conectados ao exterior eram, às vezes, tão simples quanto encontrar uma "chaminé de gelo" imponente, estruturas de um metro de altura formadas pelo escape de gás. Outras vezes, isso significava encontrar entradas de cavernas, derrubando um snowmobile em um buraco obscuro no chão por acidente.
Depois de passar quatro anos mapeando uma caverna em 3-D para observar suas mudanças ao longo do tempo, Curtis viu-se repetidamente enfrentando os mesmos desafios repetidas vezes. Primeiro, sua equipe não conseguiu chegar a certas áreas porque eram muito tóxicas para a exploração humana. Em segundo lugar, temiam que sua presença humana pudesse contaminar inadvertidamente o ambiente raro com micróbios introduzidos. Essas duas preocupações levaram-no a considerar a utilidade dos exploradores robóticos.
"Se tivéssemos um robô que pudesse se locomover no gelo, poderíamos explorar cavernas microbialmente sensíveis e cheias de gás", diz Curtis. Seu próprio remendo de bot de gelo acabou sendo um bom ajuste para o trabalho já em curso no JPL, no qual ele se juntou como roboticista em outubro passado.
Os microscópios tendem a rasgar o gelo em vez de segurá-los, já que o acessório é projetado para espremer os espinhos sobre a rocha para ganhar espaço. Então, Curtis projetou um acessório que usava minúsculos furos para cavar-se em uma superfície gelada.
O design original ficou entupido com gelo, diz Curtis, então ele se voltou para algo que os entusiastas do gelo humanos confiam em suas vidas: parafusos de gelo de prateleira. Eles são ocos, permitindo que o gelo atravesse, em vez de se acumular atrás do final da perfuração, e também permitiriam que a LEMUR produzisse e coletasse amostras de gelo à medida que se arrastasse lentamente.
Os próximos testes do mundo do gelo provavelmente ocorrerão nas geleiras no topo do Monte Rainier, em Washington - com o chassi completo do LEMUR e não apenas um acessório de pé sem corpo. Mas Parness disse que a capacidade de testar as capacidades de amostragem também ressalta outro objetivo fundamental de todo o processo de desenvolvimento.
“Com testes de campo, estamos sempre tentando atingir dois objetivos: demonstrar tecnologias para uso futuro, mas também fazer ciência significativa naquele local”, diz ele. Em outras palavras, não são apenas os testes LEMUR que nos ajudam a entender eventualmente os criovulcões em outros corpos; "Isso nos beneficia na Terra também", diz Parness.
 LEMUR treina no laboratório de Aaron Parness no JPL durante um teste recente. (NASA / JPL-Caltech)
LEMUR treina no laboratório de Aaron Parness no JPL durante um teste recente. (NASA / JPL-Caltech) Por mais de 35 anos, a Penelope Boston tem procurado a vida microbiana e seus indicadores em ambientes extremos, como na Cueva de Villa Luz em Tabasco, no México. Em seu antigo papel como diretora de estudos de caverna e carste no Instituto de Mineração e Tecnologia do Novo México, onde estudou processos de envelhecimento e erosão de cavernas subterrâneas e buracos, Boston dirigiu Parness para locais onde sua equipe e a LEMUR pudessem aprender o que procurar, e como procurar por isso.
"Ajudei a equipe de Aaron a entender quais poderiam ser as sugestões sutis que poderiam indicar possíveis depósitos microbianos ou minerais de interesse para o LEMUR inspecionar", disse Boston, que agora dirige o Instituto de Astrobiologia da NASA, por e-mail.
O cardápio de possibilidades, ela acrescentou, são padrões deixados para trás em ou sobre formações rochosas por processos biológicos, tais como texturas que mostram que microorganismos têm trabalhado transformando rochas ou depósitos minerais. Na Terra, tal evidência existe em lugares como Lechugilla Cave, no Novo México, onde acredita-se que as bactérias que se alimentam de enxofre, ferro e manganês tenham desempenhado um papel na formação das cavernas e formações de pedra espetaculares lá.
As pistas deixadas pela vida microbiana geralmente não são tão óbvias. Mas testando uma variedade de instrumentos em restos microbianos vivos e fossilizados, robôs como o LEMUR podem lançar mais luz sobre como esses micróbios viveram, moldaram seus ambientes e morreram.
Parte do desafio é garantir que as ferramentas sejam pequenas o suficiente para serem móveis. Então, além de testar o hardware, Parness e sua equipe têm trabalhado com parceiros universitários para desenvolver instrumentos de análise e sensoriamento remoto miniaturizados. A ideia é que a LEMUR possa usá-los em sua barriga ou como uma mochila, mapear uma caverna ou terreno em 3D com a lidar, para cromatografia gasosa, para procurar moléculas orgânicas e ricas em carbono com um pequeno espectrômetro de infravermelho próximo.
“[Aaron] O grupo de Parness está explorando as possibilidades de dotar o LEMUR de reconhecimento de padrões e aprendizado de máquina para ajudá-lo a enxergar como um ser humano”, disse Boston. "A paleobiologia pode frequentemente ser muito fina e sutil, e capacidades visuais e de interpretação aprimoradas que os robôs podem trazer para a mesa são ferramentas potencialmente imensamente poderosas para nos ajudar a ver e entender melhor a paleobiologia."
 Aaron Curtis, um estudante de pós-doutorado no JPL, no topo do Monte Antarctica. Erebus, o vulcão ativo mais ao sul da Terra. (Dylan Taylor)
Aaron Curtis, um estudante de pós-doutorado no JPL, no topo do Monte Antarctica. Erebus, o vulcão ativo mais ao sul da Terra. (Dylan Taylor) Sob o orçamento federal proposto da Casa Branca, o financiamento para a Missão de Redirecionamento de Asteróides - o programa onde o LEMUR é mais provável de ser usado - seria eliminado. No entanto, Parness e sua equipe foram direcionados para continuar seu trabalho no LEMUR. No final de 2017, Parness estará voltando para a área de Titus Canyon do Vale da Morte, onde ele testou o LEMUR antes, parando por tubos de lava no Novo México no verão.
Ali, algas fossilizadas com 500 milhões de anos de idade permanecem como um análogo para potenciais remanescentes antigos em outros lugares - mas os engenheiros devem garantir que o LEMUR possa vê-los. “Se estamos tentando procurar vida nas paredes de penhascos de Marte ou outros planetas, devemos procurar os vestígios mais antigos da vida na Terra e testar nossos instrumentos lá”, diz Parness. "Se não podemos detectar a vida em nosso próprio planeta, o que nos dá confiança de que poderíamos encontrá-lo em uma amostra mais antiga e dura?"