É muito comum que os seres humanos - especialmente aqueles que trabalham na indústria - dêem um nó, retire o revestimento de um cabo, insira um alfinete em um buraco ou use uma ferramenta manual como uma furadeira. Podem parecer tarefas simples, mas são realmente muito complexas e envolvem movimentos extremamente delicados dos dedos e das mãos.
Conteúdo Relacionado
- Como os robôs saíram do laboratório e começaram a ajudar os humanos
Embora os robôs estejam cada vez mais envolvidos no trabalho da fábrica e em uma ampla gama de outros tipos de trabalho - inclusive na indústria de serviços e na saúde -, sua destreza não é tão impressionante. Desde que as pessoas os trouxeram para trabalhar em fábricas automotivas há mais de 50 anos, nós construímos robôs que podem soldar, pintar e montar peças muito bem. As melhores mãos robóticas de hoje podem pegar objetos familiares e movê-los para outros lugares - como tirar produtos de caixas de depósito e colocá-los em caixas.
Mas os robôs não podem orientar uma ferramenta manual adequadamente - digamos, alinhando uma chave de fenda Phillips com as ranhuras de um parafuso ou apontando um martelo para uma unha. E eles definitivamente não podem usar as duas mãos juntas de maneira detalhada, como substituir as baterias em um controle remoto.
As mãos humanas são excelentes nessas tarefas e muito mais. Para chegar perto de rivalizar com o que nossas mãos são capazes de fazer, as mãos robóticas precisam de mais agilidade, confiabilidade e força - e precisam ser capazes de sentir com mais precisão e avançar ainda mais do que agora, para descobrir o que re segurando e como segurá-lo melhor. Para que os robôs possam trabalhar ao lado de humanos, teremos que descobrir como fazer robôs que podem literalmente nos dar uma mão quando nossos próprios dois não são suficientes.
Meu grupo de pesquisa na Northeastern University está trabalhando para fazer exatamente isso, em especial para robôs humanóides como a Valkyrie, da NASA, que tem três dedos e um polegar em cada mão. Cada dígito tem juntas semelhantes a nós, e cada mão tem um pulso que pode girar facilmente. Estamos trabalhando na criação de movimentos - combinações de movimentos de braço, punho, dedos e polegar que coletivamente realizam uma tarefa, como mover uma chave em um círculo para apertar um parafuso ou puxar um carrinho de um lugar para outro.
 Cada um desses robôs industriais possui várias ferramentas especializadas. Poderiam muitas das suas tarefas ser feitas por mãos robóticas? (Steve Jurvetson / flickr, CC BY)
Cada um desses robôs industriais possui várias ferramentas especializadas. Poderiam muitas das suas tarefas ser feitas por mãos robóticas? (Steve Jurvetson / flickr, CC BY) A importância das mãos
Em vez de fazer de cada robô uma máquina sob medida para uma tarefa muito específica, precisamos projetar robôs de uso múltiplo, ou até mesmo máquinas que possam ser chamadas de “propósito geral” - bom para praticamente qualquer tarefa. Uma chave para o sucesso desses tipos de robôs será uma excelente mão.
Nosso trabalho se concentra em projetar uma nova classe de mãos robóticas adaptáveis, capazes de movimentos precisos precisos e agarramento autônomo. Quando robôs são capazes de martelar pregos, trocar baterias e fazer outros movimentos semelhantes - básicos para humanos, mas muito complexos para robôs - estaremos a caminho da destreza humana em mãos robóticas.
Atingir esse objetivo também envolve a invenção de novos projetos que incorporam elementos duros e macios - a maneira como o osso humano dá força a um aperto, com a pele espalhando a pressão para que um copo de vinho não se rompa.
Desenvolvimento e testes mais rápidos
Melhorias tecnológicas modernas estão facilitando o processo de desenvolvimento. Com a impressão 3D, podemos criar protótipos muito rapidamente. Podemos até fabricar componentes descartáveis de baixo custo para experimentar diferentes arranjos de mecanismos, como garras de dois ou três dedos para tarefas simples de pick-and-place ou mãos de robôs antropomórficos para operações mais delicadas.
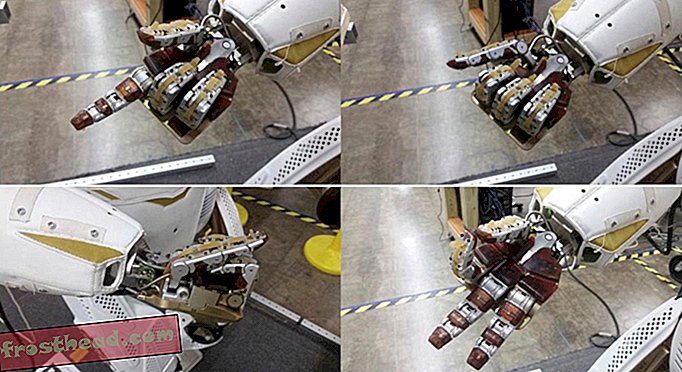 Diferentes tipos de mãos em um robô da NASA Valkyrie. (Universidade de Northeastern, CC BY-ND)
Diferentes tipos de mãos em um robô da NASA Valkyrie. (Universidade de Northeastern, CC BY-ND) À medida que as câmeras eletrônicas e os sensores diminuem, somos capazes de incorporá-los de novas maneiras. Por exemplo, se colocamos sensores de pressão e câmeras em uma mão robótica, eles podem dar feedback ao controlador do robô (seja humano ou automatizado) quando um aperto é seguro ou se algo começar a escorregar. Um dia eles podem ser capazes de perceber em qual direção o objeto deslizando está se movendo, para que o robô possa pegá-lo.
Essas habilidades já são uma segunda natureza para os seres humanos através da visão e propriocepção (a capacidade de sentir as posições relativas das partes do corpo sem olhar ou pensar sobre isso). Quando conseguirmos alcançá-los em robôs, eles poderão fazer coisas como detectar se um aperto é muito forte e está apertando muito um objeto.
Planejamento de movimentos coordenados
Outro marco será desenvolver métodos para os robôs descobrirem quais movimentos eles precisam fazer em tempo real, incluindo sentir o que está acontecendo em suas mãos a cada momento. Se uma mão robótica puder detectar alterações em objetos que está manipulando, ou manipular itens enquanto os segura, eles podem ajudar com as tarefas manuais comuns, como amarrar nós e descascar fios.
Trabalhar com as duas mãos juntas é ainda mais distante no futuro, embora forneça um impulso significativo, particularmente para a manufatura. Um robô que pode operar uma broca com duas mãos ou passar peças de uma mão para outra seria uma grande melhoria, permitindo que as fábricas automatizem ainda mais etapas em seus processos.
 Este é o robô do futuro? (NASA)
Este é o robô do futuro? (NASA) Nós, humanos, ainda não desenvolvemos esses sistemas. Conseguir a destreza autônoma do robô, semelhante à humana, manterá os pesquisadores, tecnólogos e inovadores da robótica ocupados no futuro previsível. Ele não vai desacelerar a revolução da robótica em andamento na fabricação, porque os processos atuais ainda têm muito espaço para automação para melhorar a segurança, a velocidade e a qualidade. Mas à medida que melhoramos os robôs, eles poderão nos ajudar.
Este artigo foi originalmente publicado no The Conversation.
Taskin Padir, Professor Associado de Engenharia Elétrica e de Computação, Northeastern University